- 本文为我入门域适应的一些随手记,按照时间顺序进行排序,包含了一些思考和反馈。
- 摘录我阅读的文章原文部分使用斜体,关于思考总结的部分使用正常字体。
第一次阅读
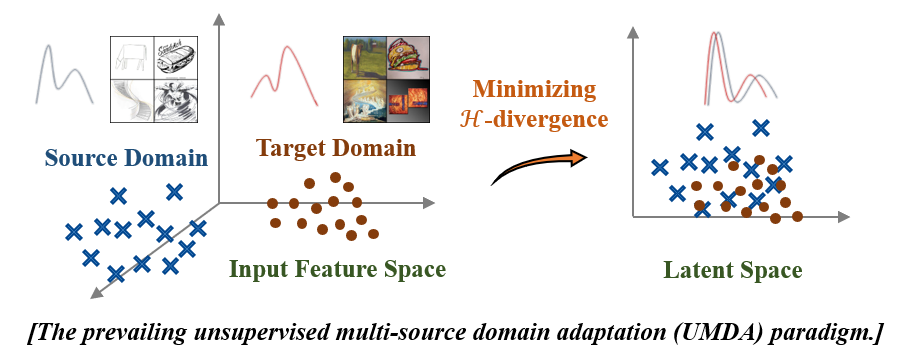
在机器学习中,Domain Shift是一个很常见的问题,即在训练数据与真实场景来自于不同的分布。 如在医学深度学习模型中,用A医院的数据(Source Domain)训练的模型往往在B医院(Target Domain)预测不准。在摄像头行人重识别(Re-ID)问题中,多个摄像头捕捉的场景分布完全不一致,导致单个行人在多个摄像头中的"重识别"变得较为困难。在联邦学习中,不同客户的数据分布不一致(non-iid)也是最常见的全局模型训练问题。
而domain adaptation即是对于domain shift的一种解决方案。与其他流派(如迁移学习和微调)不同的点在于,domain adaptation保留了在source domain上的高精度, 并通过一些方法缩小表示空间(将数据从原始输入形式“如图像、文本”转换后得到的特征向量所在的抽象空间,在当前语境下,它是源域与目标域数据通过特征提取层映射后的空间)上Source与target模型特征的距离。
在了解大方向后,文章给出了一些数学推导,我感觉有点难以理解,这里先记录一些定义和简单的公式:
-
文章定义一个domain由两个部分组成:$D,f$
- $D$(分布函数):可以理解为“画风“或数据长什么样。比如源域$D_S$是高清图,目标域$D_T$是高斯模糊图。
- $f$(标签函数):是数据的标签,如在二分类问题中输入一张图$x$,它到底是猫还是狗(0或1)。
在 Domain Adaptation 中,我们通常假设物体的本质不变,只是画风变了。 也就是说,一张猫的图片,无论变多模糊,它依然是猫。也就是: $f_S \approx f_T$, 但是 $D_s \neq D_T$
-
什么是误差?
公式 :
$$ \epsilon(h, f; \mathcal{D}) = \mathbf{E}_{\mathbf{x} \sim \mathcal{D}}|h(\mathbf{x}) - f(\mathbf{x})| $$- $h$ (hypothesis,假设):学习函数,就是我们训练的模型网络。
- $f$:真实标签。
- $\epsilon$ (error):误差。
这个公式大概是代码里写的 Loss 函数(或者说测试集上的错误率)。 它表示:在某种画风 $\mathcal{D}$ 下,你的模型 $h$ 预测的结果,和真实答案 $f$ 之间相差多少。
- $\epsilon_S(h)$:模型在源域(清晰图)上的错误率。
- $\epsilon_T(h)$:模型在目标域(模糊图)上的错误率。
我们手里只有源域的标签,所以我们只能把 $\epsilon_S(h)$ 训练得很小。但我们真正想要的是,$\epsilon_T(h)$ 也很小。
-
关键公式:泛化误差上界
$$ \epsilon_T(h) \le \epsilon_S(h) + d_1(\mathcal{D}_S, \mathcal{D}_T) + \text{常量} $$我们把这个公式拆成三块来看: 你要想让目标域错误率 $\epsilon_T(h)$ 很小(等号左边),你必须让等号右边的三项都很小:
- $\epsilon_S(h)$:源域的错误率。
- 代码体现:将源域的Loss 降到最低。
- $d_1(\mathcal{D}_S, \mathcal{D}_T)$:源域和目标域的距离(画风差异)。
- 所有DA重点关注的模块。既然清晰图和模糊图有代沟,我们就在网络里加个模块,把他们的特征“拉近”,让这个距离 $d_1$ 变小。
- $\min\{...\}$ 项:两个域标签函数的差异。
- 我们通常假设猫就是猫,不管清不清晰,所以这部分是个很小的常数,通常被忽略。
- $\epsilon_S(h)$:源域的错误率。
-
如何衡量距离?从$d_1$ 到 $\mathcal{H}$-distance :
-
$\mathcal{H}$-距离(公式4)
$$ d_{\mathcal{H}}(\mathcal{D}_S, \mathcal{D}_T) = 2 \sup_{h \in \mathcal{H}} |\Pr_{\mathcal{D}_S}(I(h)) - \Pr_{\mathcal{D}_T}(I(h))| $$这个公式有些复杂,所以我让Gemini帮我生成了详细的解释:
1. $I(h)$ 是什么?—— “VIP 准入名单”
- 文献里的原话:$I(h) = \{\mathbf{x} : h(\mathbf{x}) = 1, \mathbf{x} \in \mathcal{X}\}$
- 【破壁机翻译】: 假设你的模型 $h$ 是一个“保安”(二分类器),它的任务是判断来的人是不是 VIP(输出 1 是 VIP,输出 0 不是)。 那么,$I(h)$ 就是所有被这个保安放行(判定为 1)的人的集合。
- 💻 代码体现:
就相当于你在 PyTorch 里写了一句:
vip_group = x[model(x) == 1]
2. $\Pr$ 是什么?—— “放行概率(命中率)”
- 符号含义:$\Pr$ 就是 Probability(概率)。底下的下标 $\mathcal{D}_S$ 或 $\mathcal{D}_T$ 代表你是在哪个数据集里抓人。
- 【破壁机翻译】:
- $\Pr_{\mathcal{D}_S}(I(h))$:你在源域(比如:白天拍的照片)里闭着眼睛瞎抓一张,这张照片被模型判为 1 的概率是多少?(假设是 30%)
- $\Pr_{\mathcal{D}_T}(I(h))$:你在目标域(比如:黑夜拍的照片)里闭着眼睛瞎抓一张,这张照片被模型判为 1 的概率是多少?(假设是 80%)
- $|\Pr_{\mathcal{D}_S} - \Pr_{\mathcal{D}_T}|$:取个绝对值,算出概率差($|30\% - 80\%| = 50\%$)。
- 这个“差值”说明了什么? 如果同一个保安 $h$,对白天的人放行率是 30%,对黑夜的人放行率是 80%,差值很大,说明这个保安(模型)对环境变化非常敏感(歧视严重)。说明这两个数据集在保安眼里差距很大。
3. $\sup$ 是什么?—— “找茬大王(找最大值)”
- 符号含义:
sup全称是 Supremum(上确界)。你可以简单粗暴地把它等同于 $\max$(求最大值)。 - 底下的 $h \in \mathcal{H}$:$\mathcal{H}$ 代表你的“模型家族”(比如所有参数组合下的 ResNet18 模型)。
- 【破壁机翻译】:
现在,你手下有一万个保安(代表所有可能的模型参数组合 $h$)。
sup的意思就是:作为老板,你要对这一万个保安挨个进行测试,专门挑出那个“双标最严重”、“对源域和目标域态度差异最大”的保安。 把这个“最能找茬的保安”找出的概率差,定义为这两个数据集的最终距离。
💡 连起来理解:什么是 $\mathcal{H}$-distance?
现在我们把整个公式连起来读:
两个数据集的 $\mathcal{H}$ 距离,就是我们在所有的模型($\sup_{h \in \mathcal{H}}$)中,找到那个最能把这两个数据集区分开来的模型,它所表现出的“双标程度(概率差)”。
为什么要这么定义?(高能预警,这联系到了深度学习的本质!)
你回想一下公式 (2) 的 $d_1$ 距离,那个距离是站在“上帝视角”找不同,太苛刻了。 而公式 (4) 聪明就聪明在:它把距离和模型绑定在了一起。
如果两个数据集(清晰图和模糊图),在物理像素上肯定不一样(上帝视角看距离很大)。 **但是!如果我们穷尽了所有的神经网络 $h$,连那个“最会找茬的神经网络(sup)”**都发现: “哎?我怎么觉得清晰图里有 30% 是猫,模糊图里也有 30% 是猫?我完全感觉不到差别啊!”
那就意味着:在神经网络的视角下,这两个数据集的距离为 0!
👨💻 最终落地:这在代码里怎么实现?(诞生了对抗域适应)
理论家写出了 $\sup$(找最大差异),工程师怎么把它变成代码?
答案是:训练一个“域分类器(Domain Discriminator)”。
- 我们写一个网络,专门去预测图片是来自源域(0)还是目标域(1)。
- 我们在训练这个分类器时,让它的 Loss 尽可能小(也就是让它尽可能把两边区分开,这就对应了数学上的 $\sup$ 操作!)。
- 同时,我们让前面的 Encoder 特征提取器拼命去骗它,让域分类器的 Loss 尽可能大。
这就是著名的 GRL(Gradient Reversal Layer,梯度反转层) 算法,也就是对抗域适应的核心思想。
-
接下来文章进入了严谨的公式推导,我实在有些不想看,刚好Gemini最后提到了代码实现的问题,还挺有意思的,那么我们就继续沿着这条线探索。
第二次阅读
阅读材料:与Gemini的对话。
在第一次阅读最后,我们从数学公式的定义转向具体的代码,现在我们通过和Gemini对话来深入。
DANN(Domain-Adversarial Training of Neural Networks)
根据上文的笔记,我们知道域适应的主要数据集分为两种:源域(source)和目标域(target)。 基于此,DANN网络将结构分为三个模块:
- 特征提取器(Encoder):主要用于提取两个域的特征。
- 标签分类器(Label Classifier):基于提取的特征进行分类。
- 域分类器 (Domain Discriminator):基于提取的特征判断输入的图片属于哪个域。
冲突来了:
- 域分类器的目标是高效识别两个域(也就是算出了那个最大的 H-distance)
- 而Encoder的目标则是模糊两个域的特征让域分类器无法识别。
如何提高Encoder“欺骗”的效率?这就引出了GRL。
GRL(Gradient Reversal Layer)
在正常的神经网络中,反向传播(Backward)传回来的梯度(Gradient)是向着loss减小的方向进行的。 在DANN中,域分类器遵循这个规则,但对与Encoder则不一样。
Encoder目标是混淆两个域的区别,增大loss,而传统的反向传播会使loss减小,所以我们需要在loss前乘上一个负号, 于是,Encoder 拿着相反的梯度更新了参数,成功实现了让 Loss 最大化的目的。这就是GRL在网络中的作用。
代码实现(Gemini代写):
第一步:写出 GRL 的底层逻辑:
import torch
import torch.nn as nn
from torch.autograd import Function
# 自定义一个带反向求导规则的层
class GradientReversalLayer(Function):
@staticmethod
def forward(ctx, x, alpha):
# 顺向传播:记住这个 alpha (反转系数,通常是 1),然后原封不动地返回 x
ctx.alpha = alpha
return x.view_as(x)
@staticmethod
def backward(ctx, grad_output):
# 反向传播:叛徒出现了!把传回来的梯度乘上负的 alpha
output = grad_output.neg() * ctx.alpha
# 第二个返回值是 None,因为 forward 里的 alpha 不需要求导
return output, None
# 把这个魔法封装成一个普通的 nn.Module,方便我们像搭积木一样使用
class GRL(nn.Module):
def __init__(self, alpha=1.0):
super(GRL, self).__init__()
self.alpha = alpha
def forward(self, x):
return GradientReversalLayer.apply(x, self.alpha)
第二步:搭建 DANN 网络:
class DANN(nn.Module):
def __init__(self):
super(DANN, self).__init__()
# 1. 伪造大师 (特征提取器 Shared Encoder)
self.encoder = nn.Sequential(
nn.Conv2d(3, 64, 3, padding=1),
nn.ReLU(),
nn.MaxPool2d(2)
)
# 2. 动物专家 (任务分类头 Task Head)
self.label_classifier = nn.Sequential(
nn.Linear(64 * 16 * 16, 128),
nn.ReLU(),
nn.Linear(128, 10) # 假设分 10 类动物
)
# 3. 海关警察 (域分类头 Domain Head)
self.domain_classifier = nn.Sequential(
nn.Linear(64 * 16 * 16, 64),
nn.ReLU(),
nn.Linear(64, 2) # 只分 2 类:0是源域(高清),1是目标域(简笔画)
)
# 加入叛徒翻译官!
self.grl = GRL(alpha=1.0)
def forward(self, x):
# 共同提取特征
features = self.encoder(x)
features_flat = features.view(features.size(0), -1)
# 路线 A:正常去做分类任务
class_preds = self.label_classifier(features_flat)
# 路线 B:特征经过 GRL,再交给域分类器
reversed_features = self.grl(features_flat)
domain_preds = self.domain_classifier(reversed_features)
return class_preds, domain_preds
训练逻辑:
# 假设我们有清晰图数据 (Source) 和 模糊图数据 (Target)
criterion = nn.CrossEntropyLoss()
for (img_S, label_S), (img_T, _) in zip(source_loader, target_loader):
# 把源域打上域标签 0,目标域打上域标签 1
domain_label_S = torch.zeros(img_S.size(0), dtype=torch.long)
domain_label_T = torch.ones(img_T.size(0), dtype=torch.long)
# ---------------------------
# 1. 训练源域 (Source)
# ---------------------------
class_preds_S, domain_preds_S = model(img_S)
# 源域能算分类 Loss(因为有真实标签)
loss_class = criterion(class_preds_S, label_S)
# 源域算域 Loss(警察要认出这是 0)
loss_domain_S = criterion(domain_preds_S, domain_label_S)
# ---------------------------
# 2. 训练目标域 (Target)
# ---------------------------
class_preds_T, domain_preds_T = model(img_T)
# 注意:目标域没有类别标签,所以不能算分类 Loss!
# 目标域只能算域 Loss(警察要认出这是 1)
loss_domain_T = criterion(domain_preds_T, domain_label_T)
# ---------------------------
# 3. 联合优化!
# ---------------------------
# 总 Loss = 分类误差 + (警察认出源域的误差 + 警察认出目标域的误差)
total_loss = loss_class + (loss_domain_S + loss_domain_T)
optimizer.zero_grad()
total_loss.backward()
optimizer.step()
当 total_loss.backward() 执行时,魔法发生了:
- 对于
domain_classifier(警察):由于它在 GRL 之后,梯度正常流入,它会努力更新自己,让自己更聪明,把 Source 和 Target 分得更清。 - 对于 encoder(伪造大师):当警察的梯度穿过 GRL 层传给它时,乘上了负号!于是 Encoder 努力更新自己,使得提取出来的特征,让警察猜不出来!
训练到最后的结果: 警察彻底疯了,它看所有特征都觉得是 50% 源域,50% 目标域。 这就意味着,Encoder 成功剔除了“画风(清晰还是模糊)”这个无关特征,只保留了“物体的本质”。 此时,拿目标域(模糊图)去给 label_classifier 预测,准确率就会暴涨!
反思
DANN作为一个经典网络,必然也会有它的短板:
- 全局对齐导致的负迁移 (Negative Transfer):DANN 只对齐了边缘分布 $P(X)$,忽略了条件分布 $P(Y|X)$。
- 矫枉过正,Encoder会丢弃大量信息来模糊源域和目标域,导致分类效果直线下滑。
- 数据需求量大,DANN需要源域和目标域的数据,但现实中往往缺乏目标域的数据。
因此,后来的论文基于这三点进行改进,衍生出了四大方向:
- 带条件的对抗域适应 (CDAN, NIPS 2018)
- 伪标签技术 (Pseudo-labeling / Self-training)
- 熵最小化 (Entropy Minimization)
- 无源域适应 (Source-Free DA, SFDA)
这些方向基于三个问题点中的1~2个进行了深入研究和优化,具体深入就要通过读对应的论文了,入门笔记就到这里啦。